Lokalni preiskovalni algoritmi
Namesto sistematičnega preiskovanja izvajajo iterativno ocenjevanje:
- izberi začetno množico stanj
- poišči sosednja stanja od trenutnega, pri tem ne ohranjaj poti
- ponavljaj do ustavitvenega pogoja
Zanima nas le kakovost rešitve, brez poti do nje
- manjša poraba prostora
- dobimo dober približek v prostorih, prevelikih za sistematično preiskovanje
Kriterijska funkcija: ocena kakovosti rešitve
Iščemo globalni maksimum glede na kriterijsko funkcijo, težave:
- lokalni maksimumi: obtičimo v lokalnem optimumu, vsi sosedi slabši kot trenutno stanje
- planote: obtičimo v konstantni vrednosti kriterijske funkcije
- grebeni: za plezanje navzgor bi bil potreben sestop
Plezanje na hrib (hill-climbing / greedy-local search)
Strategija: Premikaj se po prostoru stanj v smeri najboljše izboljšave kriterijske funkcije
Reševanje iz lokalnih maksimumov
- Koraki vstran: v primeru iste vrednosti kriterijske funkcije dovolimo premik v to stanje, smiselno omejiti št. korakov vstran (npr. v primeru planote)
- Stohastičnost: naslednje stanje izberemo verjetnostno
- Naključni ponovni zagon: večkratni zagon iz naključnih začetnih stanj
Simulirano ohlajanje
Strategija optimizacijskega algoritma: generiramo naključne sosede trenutnega vozlišča
- najdemo boljše stanje vedno izberemo
- ==najdemo slabše stanje izberemo z določeno verjetnostjo, ki s časom pada==
Lokalno iskanje v snopu
Strategija: hranimo stanj izbiramo optimalnih sosedov (ni enako kot vzporednih iskanj - ocenjujemo kakovost cele generacije hkrati)
Problem: celoten snop iskanj lahko obtiči v lokalnih maksimumih
Rešitev: stohastično iskanje v snopu - naslednike izberemo naključno z verjetnostjo sorazmerno njihovi kakovosti
Preiskovanje brez informacije o stanju
Okolje:
- transparentno: agent zazna popolno informacijo preiskovanje prostora dejanskih stanj
- netransparentno: agent nima informacije o stanju preiskovanje prostora verjetnih stanj
Definicija: - verjetna stanja: prostor, sestavljen iz potenčne množice vseh možnih dejanskih stanj (npr. stanje je verjetno stanje sestavljeno iz 2 dejanskih stanj)
- začetno stanje: največkrat množica vseh možnih dejanskih stanj
- akcije verjetnih stanj:
- : preprosto, vendar lahko pripelje do neveljavnih stanj (če je akcija možna le za 1 od 2 stanj)
- : bolj varno - razvito stanje vsebuje le stanja, ki so možen rezultat vseh akcij
- prehodna funkcija:
- ciljno stanje: verjetno stanje, v katerem vsa dejanska stanja izpolnjujejo ciljni predikat
Igranje iger
Preiskovanje prostora med 2 nasprotnikoma - več-agentno tekmovalno okolje, kjer mora agent upoštevati vpliv akcij drugega agenta na svojo uspešnost
Cilj: strategija predvidevanja akcije za vsako možno potezo nasprotnika
Algoritem MINIMAX
Predstavitev poteka igre: igralno drevo potez igralcev MAX in MIN vsebuje podmožico vseh možnih stanj igralnega drevesa, ki razkriva dovolj informacije za izvedbo poteze (problem velikega prostora stanj)
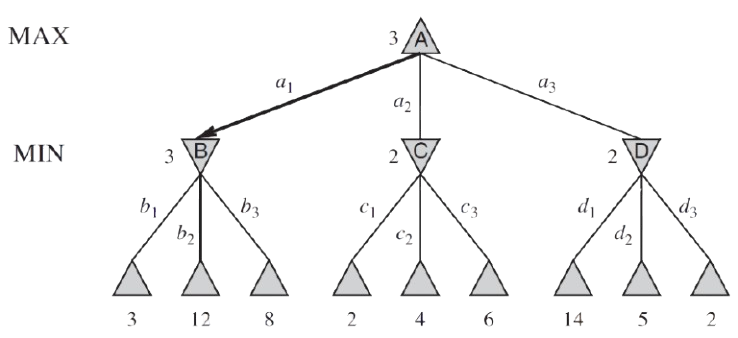
Stanja vrednostimo s kriterijsko funkcijo - pozitivne vrednosti ugodne za MAX, negativne za MIN
- konstantna vsota kriterijske funkcije (zero-sum): vsota vrednosti kriterijskih funkcij za oba igralca je zmeraj enaka
- spremenljiva vsota kriterijske funkcije
MAX kriterijsko funkcijo zvišuje, MIN jo znižuje:
Popolnost: da, če je prostor stanj končen
Optimalnost: da, če nasprotnik igra optimalno
Časovna zahtevnost:
Prostorska zahtevnost: / - iskanje v globino
Rezanje alfa-beta
Ne upoštevamo vej, ki ne vplivajo na končno vrednost ni nam potrebno upoštevati celotnega prostora stanj (pridobimo pomnilnik za nadaljnje preiskovanje obetavnih poddreves v globino)
- : najboljša do sedaj najdena rešitev vozlišča MAX (najvišji že najdeni maksimum)
- : najboljša do sedaj najdena rešitev vozlišča MIN (najnižji že najdeni minimum)
Algoritem: - začetno vozlišče:
- na vsakem koraku prenašamo v globino
- ob vračanju posodabljamo glede na najdene vrednosti - MAX posodablja le , MIN le
- v nekem vozlišču prekinemo preiskovanje ostalih poddreves
Časovno zahtevnost znižamo na (možna globina preiskovanja se podvoji)