Predstavitev problema
Plan: zaporedje akcij, ki pripelje od začetnega do končnega stanja
Formalni opis problema:
- začetno in ciljna stanje
- akcije - predpogoji in učinki
- predpostavka zaprtega sveta: vsa neomenjena dejstva niso resnična, akcija nima neomenjenih učinkov
Predstavitev s formalnim jezikom: STRIPS (1971) - ADL (1986) - PDDL (2005)
STRIPS
akcija(Spremenljivka_1, Spremenljivka_2, ...)
predpogoji: [atom(Argument_1, ...), ...]
učinki:
add: [atomi ...]
del: [atomi ...]
omejitve: [trditve ...]
Rezultat akcije v stanju :
PDDL
Akcija(spremenljivka_1, spremenljivka_2, ...)
PRECOND: Atom_1(argument_1, ...) AND Atom_2 ...
EFFECT: Atomi ...
Klasično preiskovanje prostora stanj
Uporaba preiskovalnih algoritmov možna uporaba akcij, ki niso relevantne kombinatorična eksplozija stanj
Rešitve:
- dobra hevristika
- drugačen pristop k preiskovanju
Planiranje s sredstvi in cilji
Algoritem:
- Izberi nerešen cilj
- Izberi akcijo, ki lahko vzpostavi (doseže) ta cilj
- Ker ima akcija predpogoje, omogoči akcijo z izvedbo predpogojev
- Izvedi akcijo
- Ponavljaj, dokler niso uresničeni vsi cilji
Sussmanova anomalija
Problem interakcije med cilji
Linearno reševanje: algoritem planiranja obravnava cilje “lokalno” - med reševanjem enega se ne ozira na druge
z doseganjem enega cilja lahko razveljavi že dosežene cilje / predpogoje zanje
vrstni red obravnavanja ciljev vpliva na nepotrebne korake
Princip varovanja / ščitenja ciljev: pri preiskovanju ne podiramo že doseženih ciljev
Rešitev:
- nelinearno planiranje - ne vztrajamo pri urejenosti ciljev
- regresiranje ciljev - drugačen algoritem
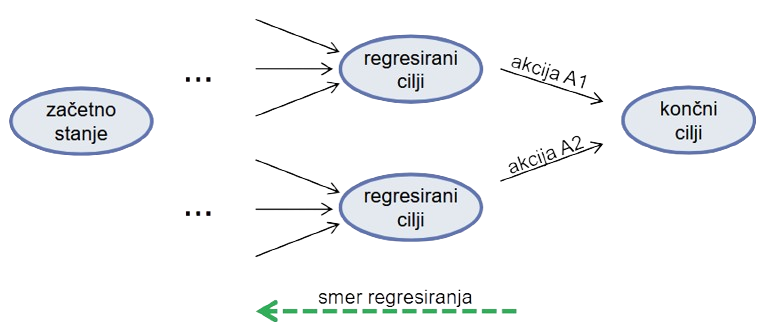
Planiranje z regresiranjem ciljev
Globalno planiranje: algoritem obravnava vse cilje hkrati
obravnavamo najbolj smiselne akcije
Algoritem:
- Izberi akcijo, ki doseže čim večjo množico ciljev
- Izračunaj predhodne cilje ob uporabi te akcije - regresiranje ciljev skozi akcijo
Analiziramo: veljavnost množice ciljev glede na postopek regresiranja, protislovja v regresirani množici ciljev
Veljati mora - Ponavljaj z regresiranjem, dokler niso uresničeni vsi cilji začetnega stanja ()
Razporejanje opravil
Omejitve realnosti:
- časovne omejitve: začetki in trajanja aktivnosti, roki zaključkov
- omejitve resursov: npr. omejeno št. procesorjev, kadra, bencina, …
Definicijo problema razširimo z:
- potrebnim vrstnim redom akcij ()
- trajanjem operacij
- št. razpoložljivih resursov
- količina (trajne) porabe resursov ob akciji
- količina (začasne) zasedenosti resursov med akcijo
Časovne omejitve
Metoda kritične poti: najdaljša pot določa dolžino trajanja celotnega plana
Vsaki akciji priredimo par [ES, LS]:
ES(Earliest Start) … najbolj zgoden možen začetekLS(Latest Start) … najbolj pozen možen začetek
Postopek računanja:
Časovna zahtevnost: ; … št. akcij, … faktor vejanja
Omejitve resursov
Neprekrivanje aktivnosti, ki potrebujejo iste resurse
Časovna zahtevnost: NP-težek problem
Algoritem najmanjše časovne rezerve: hevristka
- Na vsaki iteraciji dodeli najbolj zgodnji možen začetek akciji z izpolnjenimi predhodniki in najmanjšo časovno rezervo
- Posodobi
[ES, LS]za cel graf - Ponavljaj do uresničitve vseh ciljev