Definicija problema
Problem predstavimo s prostorom stanj:
- vozlišča stanja
- povezave akcije
- pot zaporedje stanj kot posledica akcij
- začetno vozlišče
- eno/več ciljnih vozlišč
Reševanje problema iskanje poti po grafu s preiskovanjem
Rešitev problema zaporedje akcij (pot) od začetnega stanja do ciljnega vozlišča (optimalno z najnižjo ceno poti)
Preiskovanje
Problem: kombinatorična eksplozija možnih stanj
Razvijanje vozlišča: generiranje naslednikov
Fronta: listi drevesa, ki so kandidati z razvijanje
Neinformirani preiskovalni algoritmi
Neinformirano: razpolaganjo samo z definicijo problema
Iskanje v širino (BFS)
Strategija: razvij najbolj plitvo še nerazvito vozlišče - generiramo cel nivo preden se pomakne navzdol
- pomnenje vseh alternativnih poti
- srečevanje že obiskanih vozlišč: cikel / po drugi poti
- detekcija ciljnega vozlišča ko ga generiramo ali ko ga razvijemo (vseeno)
Implementacija: razvita vozlišča v FIFO vrsti za razvijanje
informativni-preiskovalni-algoritmi-Image-1.png)
Učinkovitost:
- popolnost: neuspešen z neskončno širino, sicer zagotavlja najkrajšo rešitev
- optimalnost: da (najkrajša pot brez cen povezav)
- časovna / prostorska zahtevnost: /
Iskanje v globino (DFS)
Strategija: razvij najglobje še nerazvito vozlišče
Implementacija: naslednike v LIFO sklad za razvijanje
informativni-preiskovalni-algoritmi-Image-2.png)
Učinkovitost:
- popolnost: neuspešen v prostorih z zankami / neskončno globino
- optimalnost: ne
- časovna / prostorska zahtevnost: /
Iskanje s sestopanjem (backtracing search)
Namesto vseh naslednikov generiramo samo enega po enega
Iskanje z omejitvijo globine (depth-limited search)
==Vozlišča na mejni globini m obravnavamo, kot da nimajo naslednikov==
- premajhna / prevelika meja ne najde rešitve / neoptimalnost
- časovna / prostoska zahtevnost: /
Iterativno poglabljanje
Optimizacija DFS iskanja z omejitvijo globine: začnemo z nizko mejo, povečujemo za 1 dokler ne najdemo rešitve
informativni-preiskovalni-algoritmi-Image-3.png)
Učinkovitost:
- popolnost: da - BFS
- optimalnost: da (najkrajša pot brez cen povezav) - BFS
- časovna / prostorska zahtevnost: / - DFS
Dvosmerno iskanje
Vzporedni iskanji od začetnega vozlišča proti cilju in obratno - upamo na srečanje iskanj v sredini in manjšo časovno zahtevnost
Implementacija: BFS optimalna rešitev
- problemski prostor redefiniramo na dva koraka v originalnem problemskem prostoru
- tako dobivamo množico novih primerov - od vsakega naslednika do vsakega naslednika cilja
- ko pridemo do iskanja poti do istega vozlišča, sta se iskalni smeri srečali
Cenovno-optimalno iskanje
Posplošitev BFS za neenake cene povezav
Strategija: razvijanje vozlišča z najmanjšo dosedanjo skupno ceno poti
- ciljno vozlišče označimo šele, ko je na vrsti za generiranje - sicer mogoče obstaja boljša rešitev po drugi poti
Implementacija: fronta v prioritetni vrsti po skupnih dosedanjih cenah
Učinkovitost:
- popolnost: da (pozitivne cene povezav)
- optimalnost: da
- časovna / prostorska zahtevnost:
Informirani preiskovalni algoritmi
Informirano: razpolagajo tudi z dodatno informacijo/domenskim znanjem
Hevristično preiskovanje: uporabimo oceno obetavnosti vozlišč za doseganje cilja
Hevristika/hevristična ocena/ocena h/h(n): funkcija obetavnosti vozlišča
- nizek bolj obetavno / visok manj obetavno
Implementacija: vozlišča v prioritetni vrsti (po oceni )
Merjenje kakovosti:
- št. generiranih vozlišč
- efektivni faktor vejanja = št. generiranih vozlišč po globinah za odkritje rešitve
Požrešno iskanje
Strategija: ravij najbolj obetavno vozlišče (glede na oceno)
- cenilna funkcija (za vsako vozlišče):
Popolnost: ne (možnost ciklov)
Optimalnost: ne
Časovna/prostorska zahtevnost:
A*
Strategija: izboljšava funkcije vrednotenja -
- … znana cena poti do n
- ponovno generiramo vozlišča, če je manjši - smo našli hitrejšo pot do tistega vozlišča
Implementacija: fronta v prioritetni vrsti
Popolnost in optimalnost: da, če ustreza pogoju dopustnosti: idealno je čim bližje dejanski ceni optimalne poti, a je ne sme presegati - zmeraj je manjša od dejanske poti do cilja
Časovna zahtevnost: odvisna od kakovosti hevristike - ; … relativna napaka hevristike
Prostorska zahtevnost: vsa vozlišča hranimo v spominu problem
IDA* (Iterative-Deepening A*)
Strategija: ==iterativno poglabljanje z mejo namesto globine==
- na vsaki iteraciji razvijemo vsa vozlišča z mejna vrednost še nerazvitih vozlišč
Razvijanje mora potekati v prioritetnem vrstnem redu - razviti mora najmanjše potrebno št. vozlišč:
- mora biti monotona/konsistentna: , za vsako končno vozlišče
Poenostavitev: cenilna funkcija oz. dopustna + pada glede na dejanske cene povezav
Učinkovitost: redundanca - ponovno generiranje veliko vozlišč, neučinkovit če imajo vozlišča veliko različnih - veliko iteracij skozi vse meje
Prostorska zahtevnost: v pomnilniku mora hraniti le trenutno pot, ne vseh vozlišč
Kakovost hevrističnih funkcij
Kakovost lahko ocenimo:
- št. generiranih vozlišč
- efektivni faktor vejanja = št. generiranih vozlišč po globinah za odkritje rešitve
Oboje želimo minimizirati
Relaksacija modela: ignorira nekatera pravila igre za lažjo oceno stanja ()
Lokalni preiskovalni algoritmi
Namesto sistematičnega preiskovanja izvajajo iterativno ocenjevanje:
- izberi začetno množico stanj
- poišči sosednja stanja od trenutnega, pri tem ne ohranjaj poti
- ponavljaj do ustavitvenega pogoja
Zanima nas le kakovost rešitve, brez poti do nje
- manjša poraba prostora
- dobimo dober približek v prostorih, prevelikih za sistematično preiskovanje
Kriterijska funkcija: ocena kakovosti rešitve
Iščemo globalni maksimum glede na kriterijsko funkcijo, težave:
- lokalni maksimumi: obtičimo v lokalnem optimumu, vsi sosedi slabši kot trenutno stanje
- planote: obtičimo v konstantni vrednosti kriterijske funkcije
- grebeni: za plezanje navzgor bi bil potreben sestop
Plezanje na hrib (hill-climbing / greedy-local search)
Strategija: Premikaj se po prostoru stanj v smeri najboljše izboljšave kriterijske funkcije
Reševanje iz lokalnih maksimumov
- Koraki vstran: v primeru iste vrednosti kriterijske funkcije dovolimo premik v to stanje, smiselno omejiti št. korakov vstran (npr. v primeru planote)
- Stohastičnost: naslednje stanje izberemo verjetnostno
- Naključni ponovni zagon: večkratni zagon iz naključnih začetnih stanj
Simulirano ohlajanje
Strategija optimizacijskega algoritma: generiramo naključne sosede trenutnega vozlišča
- najdemo boljše stanje vedno izberemo
- ==najdemo slabše stanje izberemo z določeno verjetnostjo, ki s časom pada==
Lokalno iskanje v snopu
Strategija: hranimo stanj izbiramo optimalnih sosedov (ni enako kot vzporednih iskanj - ocenjujemo kakovost cele generacije hkrati)
Problem: celoten snop iskanj lahko obtiči v lokalnih maksimumih
Rešitev: stohastično iskanje v snopu - naslednike izberemo naključno z verjetnostjo sorazmerno njihovi kakovosti
Preiskovanje brez informacije o stanju
Okolje:
- transparentno: agent zazna popolno informacijo preiskovanje prostora dejanskih stanj
- netransparentno: agent nima informacije o stanju preiskovanje prostora verjetnih stanj
Definicija:
- verjetna stanja: prostor, sestavljen iz potenčne množice vseh možnih dejanskih stanj (npr. stanje je verjetno stanje sestavljeno iz 2 dejanskih stanj)
- začetno stanje: največkrat množica vseh možnih dejanskih stanj
- akcije verjetnih stanj:
- : preprosto, vendar lahko pripelje do neveljavnih stanj (če je akcija možna le za 1 od 2 stanj)
- : bolj varno - razvito stanje vsebuje le stanja, ki so možen rezultat vseh akcij
- prehodna funkcija:
- ciljno stanje: verjetno stanje, v katerem vsa dejanska stanja izpolnjujejo ciljni predikat
Igranje iger
Preiskovanje prostora med 2 nasprotnikoma - več-agentno tekmovalno okolje, kjer mora agent upoštevati vpliv akcij drugega agenta na svojo uspešnost
Cilj: strategija predvidevanja akcije za vsako možno potezo nasprotnika
Algoritem MINIMAX
Predstavitev poteka igre: igralno drevo potez igralcev MAX in MIN vsebuje podmožico vseh možnih stanj igralnega drevesa, ki razkriva dovolj informacije za izvedbo poteze (problem velikega prostora stanj)
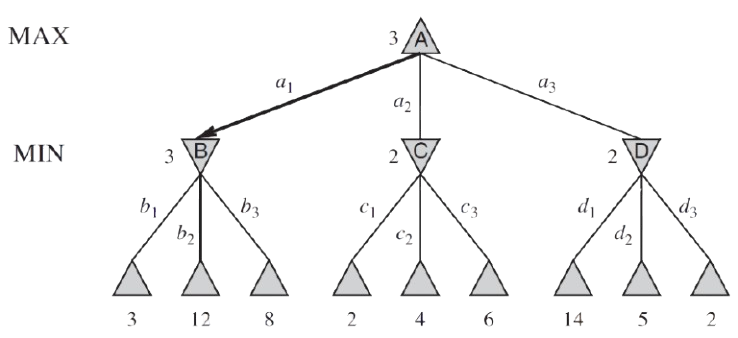
Stanja vrednostimo s kriterijsko funkcijo - pozitivne vrednosti ugodne za MAX, negativne za MIN
- konstantna vsota kriterijske funkcije (zero-sum): vsota vrednosti kriterijskih funkcij za oba igralca je zmeraj enaka
- spremenljiva vsota kriterijske funkcije
MAX kriterijsko funkcijo zvišuje, MIN jo znižuje:
Popolnost: da, če je prostor stanj končen
Optimalnost: da, če nasprotnik igra optimalno
Časovna zahtevnost:
Prostorska zahtevnost: / - iskanje v globino
Rezanje alfa-beta
Ne upoštevamo vej, ki ne vplivajo na končno vrednost ni nam potrebno upoštevati celotnega prostora stanj (pridobimo pomnilnik za nadaljnje preiskovanje obetavnih poddreves v globino)
- : najboljša do sedaj najdena rešitev vozlišča MAX (najvišji že najdeni maksimum)
- : najboljša do sedaj najdena rešitev vozlišča MIN (najnižji že najdeni minimum)
Algoritem:
- začetno vozlišče:
- na vsakem koraku prenašamo v globino
- ob vračanju posodabljamo glede na najdene vrednosti - MAX posodablja le , MIN le
- v nekem vozlišču prekinemo preiskovanje ostalih poddreves
Časovno zahtevnost znižamo na (možna globina preiskovanja se podvoji)